11. House your Robot
House your Robot
So far, you created a robot model from scratch, added sensors to it to visualize its surroundings, and developed a package to launch the robot in a simulated environment. That's a real accomplishment!
But you haven’t yet placed the robot in an environment. Let’s house it inside the world you built in Build My World project.
Adding the World File
Copy the
<yourname>.world
file from the
world
directory of the ** Build My World** project and paste it in the
worlds
directory of
my_robot.
Inside your package’s
worlds
directory you should now see two files - the
empty.world
that we created earlier and the
<yourname>.world
file that you just added.
Feel free to delete the
empty.world
file. We won’t need it anymore.
Launch the World
Edit the
world.launch
file and add a reference to the
<yourname>.world
file that you just added. To do so, open the
world.launch
file and edit this line:
<arg name="world_file" default="$(find my_robot)/worlds/empty.world"/>Replace it with this:
<arg name="world_file" default="$(find my_robot)/worlds/<yourname>.world"/>Launch!
Now, that you’ve added your world file to the
my_robot
package, let’s launch and visualize our robot inside our home.
$ cd /home/workspace/catkin_ws/
$ source devel/setup.bash
$ roslaunch my_robot world.launch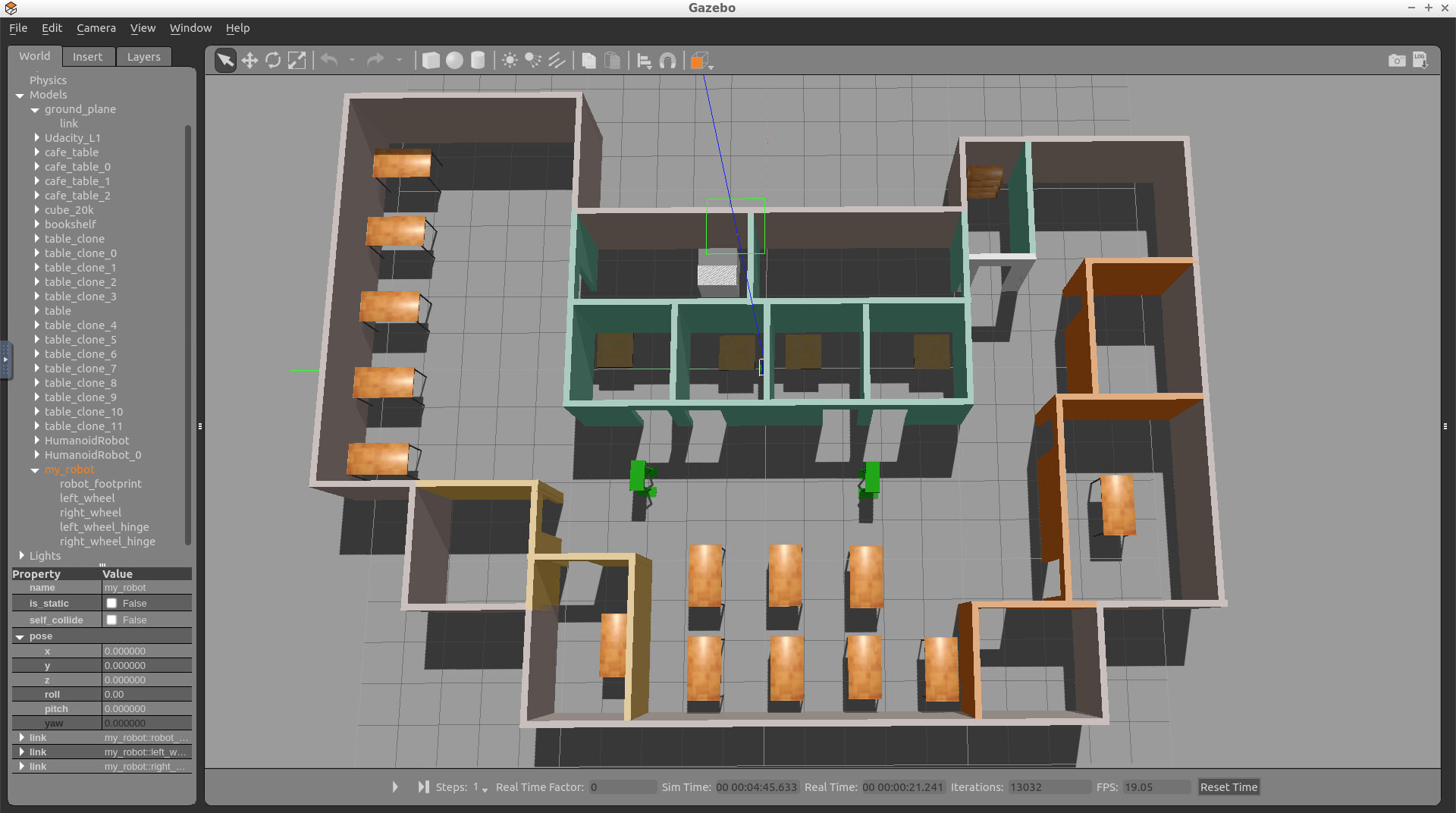
Initialize the Robot’s Position and Orientation
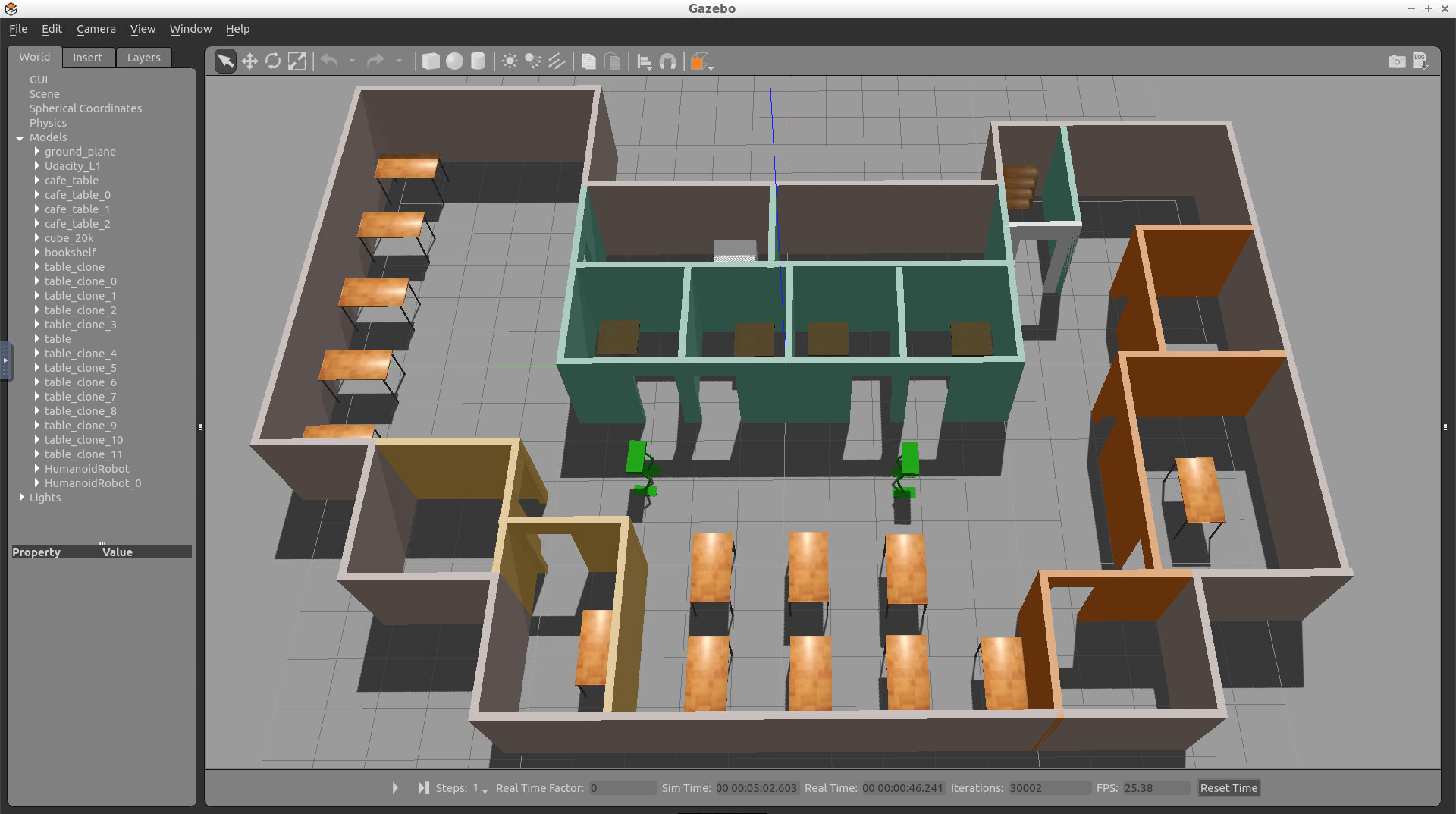
As you can see, my robot’s initial position is outside of my world! You might face the same problem. I have to change my robot’s initial pose: its position and orientation. This can be done through editing the
world.launch
file:
<!-- Robot pose -->
<arg name="x" default="0"/>
<arg name="y" default="0"/>
<arg name="z" default="0"/>
<arg name="roll" default="0"/>
<arg name="pitch" default="0"/>
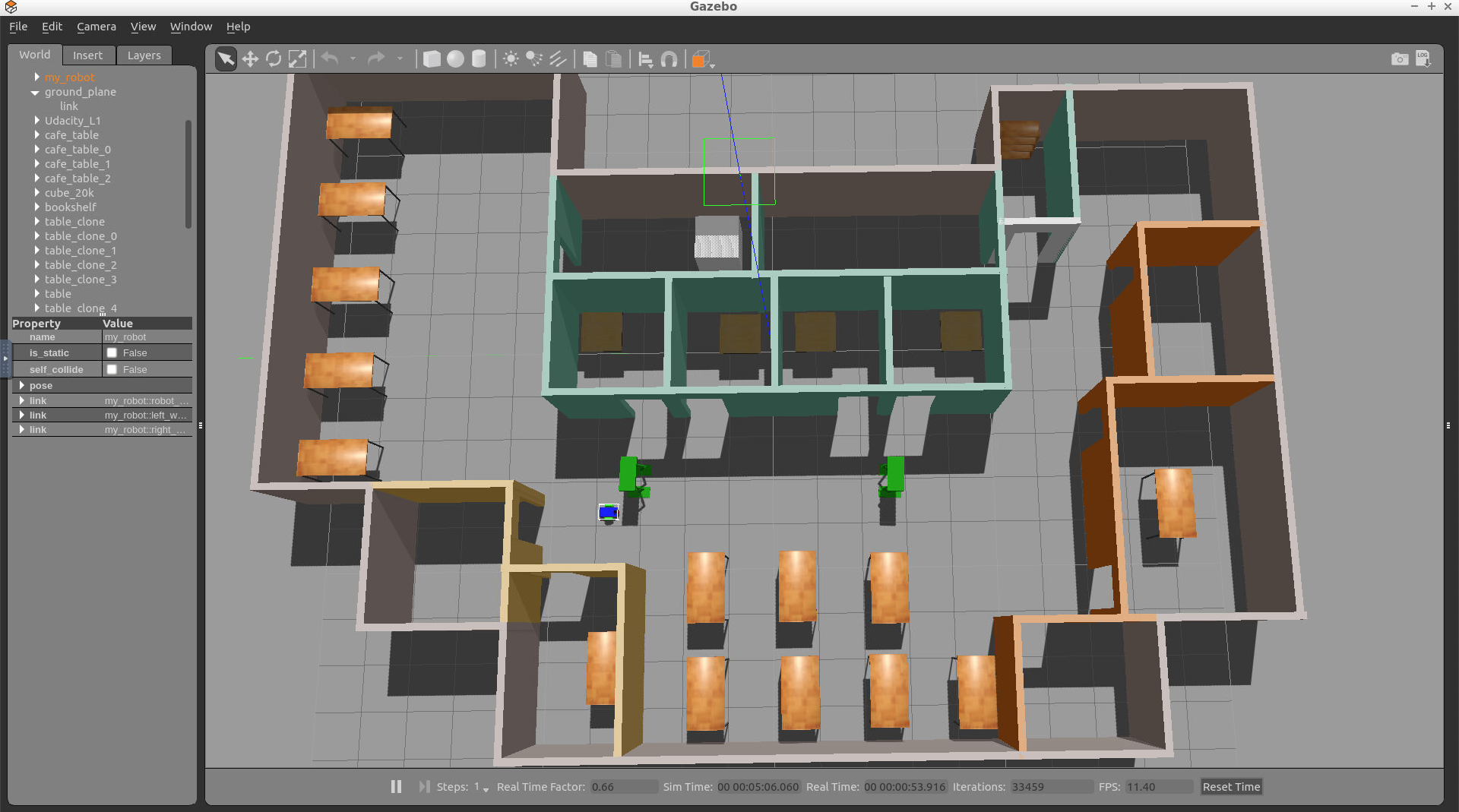
<arg name="yaw" default="0"/>The best way to figure out these numbers is to change the robot’s position and orientation within Gazebo, record its pose, and then update the launch file.
Task Description:
Follow these steps to house your robot inside your world:
Task Feedback:
Great job!